


James Williams
Technology Engineering | Mechatronics | CS Minor
Michigan State University
View My Work
About Me
Hello! I'm James Williams, a Michigan State University student pursuing a Bachelor of Science in Technology Engineering with a focus on Mechatronics and a minor in Computer Science.
I'm passionate about bridging the gap between mechanical systems and software, creating innovative solutions that combine hardware and code to solve real-world problems in agricultural automation.
Education






Technology Engineering
Michigan State University · GPA: 3.5
- Concentration: Mechatronics — control systems, robotics, embedded electronics
- Minor: Computer Science — algorithms, data structures, software design
- Combining mechanical, electrical, and software disciplines to build autonomous systems
Awards
.JPG)
Projects
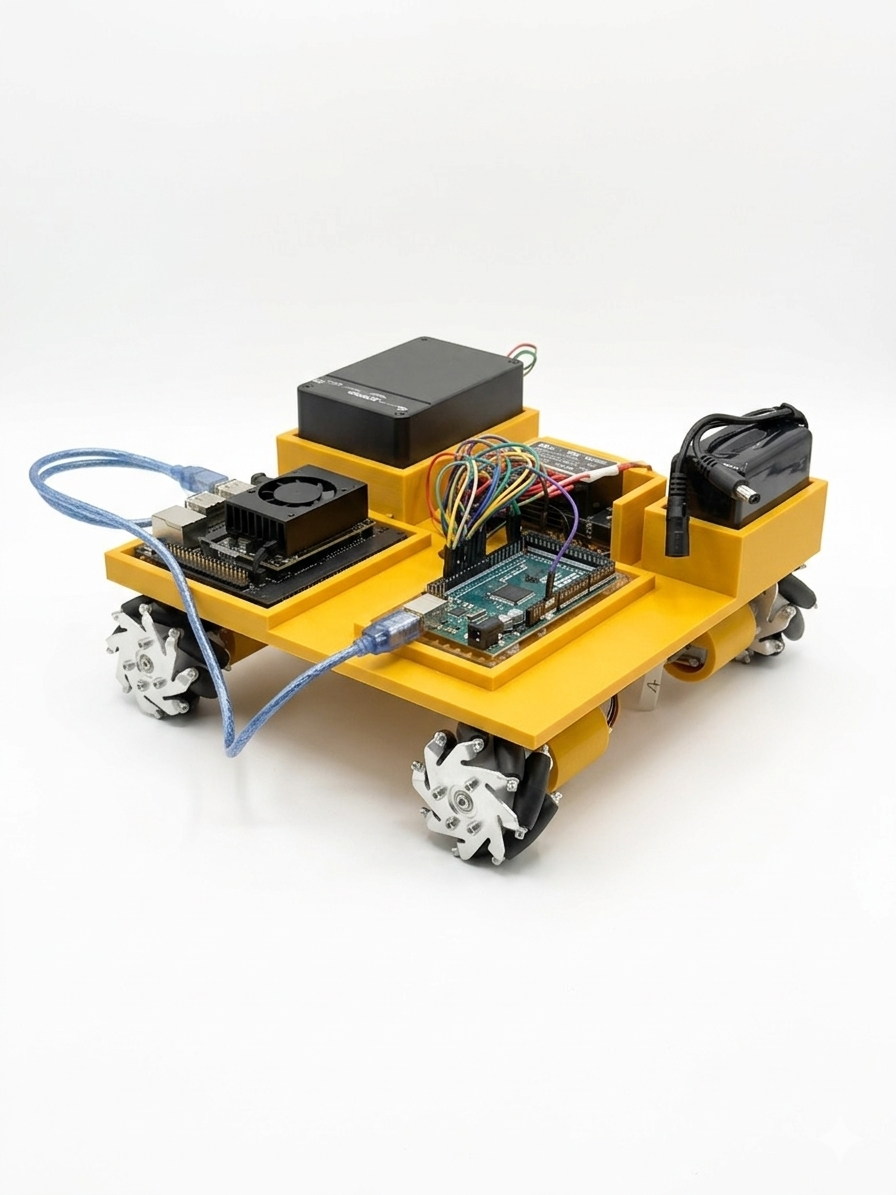
ASABE Agricultural Robotics Challenge Robot
- Autonomous ground robot for crop scouting and weed detection
- ROS2 navigation stack with sensor fusion and path planning
- Computer vision pipeline for precision field intervention
Auto-Steering Cultivator
- Autonomous row-following using camera-based crop detection
- Targeted weed intervention with precision actuator control
- ROS2 navigation stack with real-time sensor fusion

Piglet Keypoint Detection
- 7-keypoint pose estimation model trained on MSU HPCC GPUs
- Annotated 1,100+ piglet images with data augmentation pipeline
- Automated SLURM workflows for reproducible MMPose training
Autosteer Tractor System
- RTK-GPS + IMU closed-loop steering with ±2cm cross-track accuracy
- Arduino PID controller driving hydraulic valve actuators
- C# interface for path planning and real-time field monitoring
CAD & Design
30° Camera Mount
- Designed to hold a camera at a consistent 30° downward angle for field dataset collection
- Ensures repeatable camera geometry across collection runs for clean, comparable training data
- Modeled in Fusion 360 for fabrication
AI Models

Crop Row Following Model
- Real-time computer vision model for detecting and following crop rows
- Custom training pipeline on annotated field imagery for row centerline prediction
- Deployed on-robot for closed-loop autonomous navigation in row crops
Experience

Research Assistant
Smart Sensing Lab · Michigan State University
- Training 7-keypoint MMPose model on 1,100+ annotated piglet images for livestock behavior research
- Automated end-to-end HPC training pipeline: Roboflow → COCO → SLURM GPU jobs on MSU HPCC A100s
- Reproducible Conda environment and SLURM templates for future lab keypoint datasets
Student Organizations
Precision Agriculture Robotics Club
Vice President · Present
Leading a team building a fully autonomous ground robot for the ASABE Agricultural Robotics Challenge — crop scouting, weed detection, and targeted field intervention. Coordinating across mechanical, electrical, and software subteams to deliver a competition-ready platform by Summer 2026.
- ROS2 navigation stack & sensor fusion (GPS + IMU + odometry)
- Computer vision pipeline for crop row following & weed detection
- Team leadership & cross-discipline subteam coordination